В не очень далёком 2014 году, когда Крым стал «наш», а Владимир Владимирович запретил вывод капитала из России, рубль стал резко дешеветь. И российские бизнесмены решили вложить оставшиеся на руках деревянные в «российские проекты»: понятно, что сочетание «российские проекты» само по себе звучит как новый анекдот, но речь пойдёт не об этом 🙂
Ништяков типа «Вимм-Билль-Данна» и других достойных вещей на весь бизнес не хватило, а спасти капитал очень хотелось, поэтому деньги стали давать весьма интересным личностям, адекватность которых, по общеизвестным причинам не вызывала бы вопросов только у депутатов Госдумы. Интересные личности за деньги обещали всё, что душе угодно: от извлечения генома из трупа Колобка на раскопках в Кижах до постройки космической ракеты в огороде на Истре силами сидельцев из «Дома-2». Масштаб и риторика российских проектантов переплюнула все мыслимые и немыслимые пределы: даже академия наук Беларуси на их фоне кажется «девочкой», хотя дядьки из НАНБ точно знают толк в извращениях 🙂
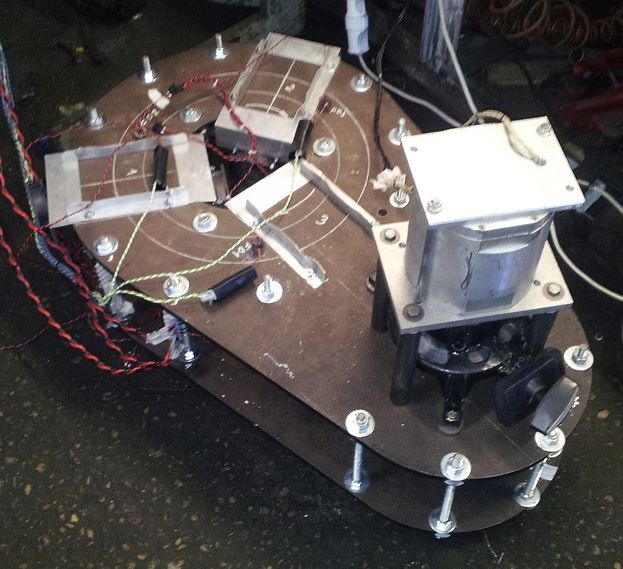
Вот так выглядит сверхъединичный генератор, видео — ниже
Волна благодати весьма ощутимо коснулась и фриков от науки, изобретающих вечный двигатель. Фрики довольно быстро сообразили, что если продолжать называть свои поделки вечным двигателем, то прибыль с этого дела можно ждать до морковкиного заговенья. Поэтому десятки тысяч людей стали энтузиастами «свободной энергии» (СЭ), а устройства стали называть «сверхъединичными» (СЕ, КПД>1), что хотя и звучит несколько расплывчато, но подобная потеря фокусировки значительно улучшает приходную часть финансового баланса в кармане складно вещающего «энергетика», а также привлекает новые толпы адептов, которые точно уверены, что всё не так, как нам говорят, правительства и учёные в сговоре с корпорациями, модераторы интернетов зорко следят, искажая схемы и описания устройств на СЭ, множество безвестных изобретателей бесследно исчезли, … — да чёрт его знает, что там в череп лезет этим недоучившимся в школе адептам бредовых идей 🙂
Несмотря на общность основного цемента, скрепляющего братство поклонников идей СЭ, деление на касты присутствует и в этом скоплении: инерционщики с безопорным движением, эфирщики с развесистой клюквой о светоносном эфире, торсионщики с неизвестной субстанцией, свойства которой каждый объясняет по своему, вакуумисты с энергией физического вакуума. К этим чудикам удивительным образом примыкают и радиолюбители с их EH-антеннами. Самая нижняя каста — инерционщики: на них и раньше косо посматривали, а после неудачного запуска в космос заводом Хруничева бригады их дрыгающихся поделок, инерционщиков и вовсе стали принимать за умалишённых. Наблюдения показали, что наименьшую перспективу огрести люлей, неся хрень в массы, имеют торсионщики, а также причисленные к ним особи, которые из лампочек и ржавых трансформаторов пытаются соорудить дармовые электростанции: видимо, раздел физики «Электричество» хуже всего усваивается человеческим мозгом. С интересом наблюдая из Беларуси происходящее в России, никто из нас и не думал, что однажды на анализ нам привезут образец реального СЕ-устройства, работающего на «свободной энергии»…

Первое знакомство с СЕ-генератором произошло в гараже 🙂
Впрочем, история попадания к нам СЕ-устройства — банальна. Бизнесмен попытался вложить деньги в «перспективный» проект одной из московских фирм. Суть проекта в том, чтобы подавая на вход поделки 1КВт электроэнергии, на выходе получать 2КВт, однако, после двух лет непрерывных вложений и переделок, перспективы получить хоть какую-то отдачу от денежных инвестиций так и оставались перcпективами. Вобщем, бизнесмен стал потихоньку подозревать, что где-то его обманули, а чтобы в этом убедиться, припёр этот «вечный двигатель» к нам. Вот видео, в котором описывается незабываемый первый день знакомства с этим дивным девайсом.
Перед тем как уехать, изобретатель чудо-агрегата, академик всех академий, поразил нас заключительным речитативом:
После подключения рекуператора катушки перестали греться, хотя до этого работу аппарата вынужденно останавливали из за перегрева. Но после включения рекуператора приборы начали показывать 80% возврата потраченной энергии только рекуператором, остальная энергия идёт из торсионного генератора. Но большого интереса сейчас эта конструкция не представляет, т.к. значительные выбросы «свободной энергии» должны появляться, когда обороты превышают 850 об.мин, но диаметр шкива под маховиком надо увеличить до 150-200мм.
Дивные звуки, неправда ли? И терминология радует: вот специально же говорит не про КПД 80%, а «80% возврата потраченной энергии«, во как!
Естественно, что СЕ-устройство оказалось тяжёлым пшиком: электросчётчик можно было как-то и попроще обдурить 🙂 Отчёт по механике с расчётами трения, кинематики и т.п. занял 8 страниц убористого текста, отчёт по электрике занял 16 страниц расчётов. Короткая и довольно скучная выжимка приводится ниже. А вообще, это не двигатель, а жестяной прикол: вот представим, что летим с этой чудо-хренью на космическом корабле, вокруг супертехнологии, и тут бац — заглох генератор; оказывается, надо ж выйти в космос шморгалку подёргать, чтобы лететь дальше 🙂
Общие положения
Устройство представляет собой вариант классического синхронного двигателя, где в качестве якоря используется сердечник из ферромагнетика. Реализация данного двигателя преследовала получение «дополнительной» электроэнергии, получаемой в результате выбросов обратной ЭДС в процессе работы электромагнитов устройства, причём обратная ЭДС на выходе устройства суммируется с выпрямленным сетевым напряжением, что вызывает перепады напряжения на выходе от 300В до 1кВ.
В связи с недостаточной массой ротора и малой полюсностью двигателя, в конструкцию пришлось ввести маховик, чтобы уменьшить проблемы с выпадением вращения ротора из синхронизма. Начальный запуск устройства производится вручную, с помощью верёвочного стартёра. Дальнейший синхронизм в довольно узких пределах поддерживается с помощью перфорированных отверстий в роторе устройства: попадание отверстия в зону действия оптодатчика вызывает срабатывание соответствующего электромагнита, который связан с оптодатчиком через логику микроконтроллера.
Механическая конструкция устройства

Все детали устройства закреплены между двух стальных станин толщиной 12мм каждая. Станины жёстко соединены между собой с помощью 17 шпилек; этот конструктив в сборе является каркасом устройства: часть деталей крепится к верхней станине, часть – к нижней.
Ротор устройства лежит в пазах подшипников, установленных на вертикальных стойках. Форма ротора – плоский диск с утолщениями, равными по длине и форме сердечникам катушек электромагнитов. Катушки электромагнитов расположены с угловым расстоянием 120° друг от друга, что должно обеспечивать равномерность вращения ротора. В плоской части ротора есть отверстия для оптодатчиков: при пересечении отверстием луча датчика, через определённый интервал срабатывает электромагнит, который втягивает сердечник. Отверстие для оптодатчика располагается на роторе таким образом, чтобы в момент пересечения луча 20% утолщённой части ротора находились в катушке электромагнита. Время задержки срабатывания и длительность импульса втягивания устанавливаются на плате управления микроконтроллером.
Ротор с помощью ременной передачи соединён с маховиком. Основная задача маховика – накопить достаточный вращающий момент, чтобы легковесный ротор не выпадал из синхронизма: диаметр ротора в данной конструкции не играет роли, для сохранения крутящего момента важна только его масса. К маховику также крепятся верёвочный стартер для начального запуска и генератор, для получения тока «рекуперации» (используется авторская терминология). Генератор вносит во вращательное движение неуправляемое торможение, пропорциональное квадрату скорости вращения, что до определённой скорости вращения позволяет компенсировать плохие частотные свойства металла ротора.
Параметры основных компонентов устройства
Силовая часть устройства питается постоянным током. Для этого сетевое напряжение выпрямляется двухполупериодным диодным мостом и сглаживается сборкой высоковольтных электролитических конденсаторов суммарной ёмкостью 15840мкФ (220мкФ * 24шт. * 3блока). Поскольку в схеме не было принято мер по ограничению тока заряда конденсаторов, «холодный старт» устройства приходится производить на пониженном напряжении через ЛАТР (лабораторный автотрансформатор).

Исходя из значения ёмкости, можно рассчитать параметры сетевого выпрямителя.
Iнагр. = C * dU / dt, где
dU = Umax – Umin, разница между максимальным и минимальным напряжениями; Umax = 220В * √2 = 310В, Umin – минимальное напряжение на конденсаторе, задаём 260В;
dt = время разряда конденсатора, dt = T – t(зар) = 0.01с — (arccos(260/310))/(2*3.141*50) = 0.0082с.
Iнагр. = 15840мкФ * 50В / 0.0082с = 96.6А
Т.е., исходя из расчёта, батарея конденсаторов рассчитана на потребляемую мощность
P = Uср. * Iнагр. = 220В * 96.6А = 21.3КВт
Индуктивность приводных электромагнитов на разных частотах была получена с помощью измерителя иммитансных параметров высшего класса точности APPA703. Приводятся усреднённые параметры для 3х катушек.

Сопротивление обмотки по постоянному току: R = 3.2 Ом.
Частота 100Гц: Lmin = 139mH(Q = 2.56), Lmax = 175mH(Q = 2.65).
Частота 1000Гц: Lmin = 92mH(Q = 3.73), Lmax = 105mH(Q = 2.66).
Частота 10000Гц: Lmin = 69mH(Q = 3.60), Lmax = 65mH(Q = 2.42).
Из приведённых измерений видно, что на частотах около 1000Гц, электромагнит работает крайне плохо, а на частоте 10000Гц электромагнит не работает вообще: потери огромны. Причины низких частотных свойств – неправильный выбор материала сердечника.
Устройство управления электромагнитами ротора состоит из трёх идентичных независимых контроллеров, которые формируют импульс управления катушками заданной длительности с заданной задержкой. Фронт начального импульса считывается с соответствующего оптодатчика. Компаратор для получения TTL-уровня собран непосредственно на проводах фототранзистора.

Сформированные TTL-импульсы от оптодатчиков поступают на входы соответствующих контроллеров.

В контроллерах вручную можно установить величину задержки импульса (индикатор с белыми цифрами) и длительность импульса, подаваемого на электромагнит (зелёные цифры). Значение задержки по умолчанию 29000 соответствует времени задержки 115млс, минимальный шаг изменения ~4мкс. Связь между цифрами на белом индикаторе и временем задержки находится по формуле:
T(задержки) = 3.97мкс * N, где N – показания индикатора.
Регулировка ширины управляющего импульса возможна с минимальным шагом 1.02млс, причём зависимость шага от показаний на индикаторе весьма замысловатая: надо сделать 256 пустых шагов чтобы ширина импульса реально поменялась. Значение ширины импульса по умолчанию 1500 соответствует времени 5.1млс. Связь между цифрами на зелёном индикаторе и временем задержки находится по формуле:
T(эл.магнита) = 1.02ms * (N / 256) , где N – показания индикатора.
Изучение логики работы блока управления показало, что на некоторой граничной частоте контроллер начинает пропускать импульсы от оптодатчика, т.е. показания на индикаторе задают предельную скорость вращения ротора, которая рассчитывается по формуле:
R(max) = 1 / (T(задержки) + T(эл.магнита))
Контроллеры управления не высчитывают угловую скорость вращения, поэтому для изменения скорости вращения ротора, приходится на ходу вручную высчитывать новые данные управления. Для установок по умолчанию 29000/1500 видно, что максимальная теоретическая скорость вращения составляет:
R(max) = 1 / (115млс + 5.1млс) = 8.3 об/с = 500 об/мин.
В прошивке блоков управления выявлены баги, которые при изменении значения на индикаторах приводят к пропаданию отображаемых показаний.
Три независимых силовых ключа управляют подачей импульсов тока в электромагниты. Схема приведена в левом углу фото. Выходное напряжение является суммой напряжения питания и выброса катушки электромагнита, и представляет собой классический обратноходовой источник, реализованный, к сожалению, с ошибками.

Основные принципы работы, симуляция
Для понимания принципов работы СЕ-устройства была произведена частичная симуляция работы его модели. В качестве объекта симуляции был выбран один силовой канал устройства: имитировать работу микропроцессорной части не имеет смысла, т.к. 1) выходные параметры контроллера известны, 2) симуляция не совсем полная в силу первичной сложности создания модели катушки с вращающимся сердечником. Однако, даже первичная симуляция наглядно покажет грубые ошибки при проектировании устройства.

Выше приводится эквивалентная схема одного канала устройства. Источник питания V1 – выпрямленное сетевое напряжение на сглаживающих конденсаторах без учёта сетевой пульсации; резистор R1 учитывает сопротивление подключающих проводов; VT1, VD1 и VD2 модели реальных деталей, предоставленные производителем; C1 – сглаживающая ёмкость 20млФ = 20000мкФ в нагрузочном пульте.
VOLTAGE_SOURCE – имитатор платы микроконтроллера в режиме 29000/1500, т.е. максимальная скорость для этих параметров составит 500об/мин.
Для скорости 500 об/мин индуктивность электромагнита L1 выбрана средней между индуктивностью с выдвинутым сердечником — 92mH, и индуктивностью со вставленным сердечником ротора — 105mH.
Симуляция в устоявшемся режиме даёт ожидаемую картину: на экране виртуального осциллографа появляется картинка работы типичного обратноходового источника, причём источника, спроектированного с грубейшими ошибками.

Красная линия показывает осциллограмму импульсов на стоке ключевого транзистора. Из осциллограммы видно, что транзистор открывается входным импульсом длиной 5.1млс, однако, по мере нарастания тока через электромагнит, транзистор переходит в активный режим, что недопустимо, т.к. в этом режиме рассеивается запредельная мощность. Очевидна нехватка напряжения импульса на затворе транзистора: по спецификации напряжение на затворе должно быть более 10В. Природу этой грубейшей ошибки легко увидеть изменив условия симуляции (см.ниже).

Очевидно, что выбор правильного режима транзистора ведёт к увеличению КПД преобразователя в целом: напряжение на нагрузке увеличилось. Также очевидно, что в реальном устройстве столь мощные транзисторы выходили из строя из-за неправильного выбора режима работы по напряжению затвора. Эта же причина является одной из причин нестабильности параметров СЕ-устройства в целом.
Отдача напряжения обратной ЭДС в нагрузку начинается сразу после закрытия транзистора и продолжается около 10млс, далее начинается такт паразитных колебаний: происходит резонансный процесс обмена энергией между индуктивностью рассеяния и некой комбинацией паразитных емкостей силового ключа и трансформатора. Ширина и амплитуда паразитных колебаний чрезвычайно высока, представляется крайне неразумным использование схемы в таком виде, т.к. паразитные колебания нагревают и катушку, и сердечник, что в свою очередь ведёт к ещё большим потерям, т.к. при нагревании ферромагнетиков их частотные и магнитные свойства ухудшаются. В реальных обратноходовых источниках для гашения паразитных колебаний используют снаббер (RCD — демпфер) или супрессор. Уменьшить паразитные колебания также можно с помощью увеличения нагрузки: увеличение нагрузки резко уменьшает добротность паразитного колебательного контура, что также уменьшает нагрев сердечника и катушки. Собственно, из-за наличия паразитных колебаний металлическую конструкцию СЕ-устройства пришлось обвешать вентиляторами, а подсоединение индуктивной нагрузки (генератора / «рекуператора») уменьшило нагрев.
Зелёная линия показывает уровень постоянного напряжения на выходе устройства без подключенной нагрузки: напряжение поднимается до своего максимального значения, т.е. ЭДС самоиндукции, и равно амплитуде площадки отдачи энергии, после закрытия транзистора. На рисунке зелёная линия поднята немного выше площадки, чтобы не мешать изображению красной осциллограммы. По отношению накачка/отдача – 5млс/10млс, видно, что СЕ-устройство в текущем режиме представляет собой понижающий обратноходовой преобразователь, т.е. его выходное напряжение будет в пределах от 312В до 624В. При установке 1500 на зелёном индикаторе контроллера, напряжение на нагрузке составляет 365В (53В обратной ЭДС) – на осциллограмме это разница между уровнем после закрытия транзистора (транзистор закрывается на уровне напряжения питания 312В) и площадкой отдачи энергии (напряжение на нагрузке 365В).
Из симуляции видно, что СЕ-устройство представляет собой классический обратноходовой преобразователь. Для приблизительной оценки свойств катушки с вращающимся сердечником, пробуем изменять в симуляции индуктивность катушки. Устанавливаем правильный режим работы транзистора, и пробуем отзыв схемы на заведомо низкую индуктивность – 60mH.

Напряжение площадки отдачи энергии составило 422В. Далее пробуем заведомо высокую индуктивность – 180mH.

Напряжение площадки отдачи энергии составило 472В.
Из симуляции видно, что параметры устройства изменяются слабо: при изменении индуктивности от 60mH (минимальная измеренная индуктивность реальных катушек) до 180mH (максимальная измеренная индуктивность реальных катушек), напряжение на нагрузке (площадка отдачи энергии) изменяется на 50В, что составляет всего 31%, т.е. появление СЕ-эффектов при установленных условиях маловероятно.
Также в схеме присутствует масса других недоработок, например отсутствие ограничения тока при первичном заряде конденсаторов, отсутствие коррекции cos ϕ — PFC (Power Factor Correction), реализация которого обязательна для всех современных электроприборов, недопустимое из-за паразитной индуктивности подключение контроллера к силовому транзистору, ошибочная схема клавиатуры, ошибка реализации SPI-шины, и т.п. Авторское утверждение, что больший по диаметру ведомый маховик может что-то поменять в системе, алогично и противоречит законам физики: в данном случае достаточно уменьшить массу маховика, (крутящий момент в невекторном представлении определяется как M = F × l). Можно привести расчёты крутящего момента, относительно коэффициента трения и усилия, развиваемого электромагнитами – из них видно, что изменение крутящего момента в 5 раз (нет разницы, что менять, массу или диаметр маховика) приведёт лишь к 8% изменению параметров системы в целом.
Очевидно, что СЕ-устройство представляет собой классический обратноходовой преобразователь, который имеет ёмкостный характер нагрузки. Ёмкостную нагрузку по современным стандартам надо обязательно компенсировать индуктивной составляющей для уменьшения реактивных потерь электроэнергии, которые не учитываются классическими электроприборами. Похоже, что именно огромная ёмкостная составляющая «вводит в заблуждение» стрелочные приборы. Введение в схему устройства PFC могло бы легко показать реальный КПД устройства. Научно-популярную статью про PFC можно прочитать по ссылке в Википедии.